
توسعه رباتهای شناگر برای کاوش اقیانوسهای بیگانه
طرح مفهومی جدید ناسا، مجموعهای از رباتهای شناگر را برای کاوش اقیانوسهای بیگانه پیشنهاد میکند که میتوانند به شکل مستقل یا گروهی جهانهای دوردست را برای یافتن نشانههای حیات جستجو کنند.
به گزارش صدای جامعه، به نقل از نیو اطلس، اقیانوسهای زیرسطحی در قمرهای غولپیکر گازی برخی از امیدوارکنندهترین مکانها برای جستجوی حیات فرازمینی هستند. ناسا اکنون بودجهای را برای پروژهای به منظور توسعه دستهای از رباتهای کوچک شناگر اختصاص داده است تا این اقیانوسهای بیگانه را برای یافتن نشانههایی از حیات فرازمینی کاوش کنند.
اروپا، قمر مشتری و انسلادوس، قمر زحل اساساً توپهای یخی بزرگی هستند که اقیانوسهایی در زیر پوسته بیرونی منجمد ضخیم آنها قرار دارد. دانشمندان مدتهاست که فرضیهای را مطرح کردهاند مبنی بر اینکه شرایط موجود در آن آبها میتواند نامزد اصلی میزبانی از حیات بیگانه باشد. به همین منظور، مأموریت “اروپا کلیپر” قرار است در دهه 2030 مجموعهای از پروازهای نزدیک را حول قمر اروپا انجام دهد تا شواهدی را در این مورد جستجو کنند.
اما اکنون، یک طرح مفهومی جدید میتواند با استفاده از ناوگانی از رباتهای شناگر موسوم به SWIM که به اندازه گوشیهای هوشمند هستند، این فرض را از نزدیک بررسی کند. ناسا بودجهای را برای توسعه این پروژه اختصاص داده است که به عنوان بخشی از برنامه مفاهیم پیشرفته نوآورانه ناسا (NIAC) شناخته میشود.


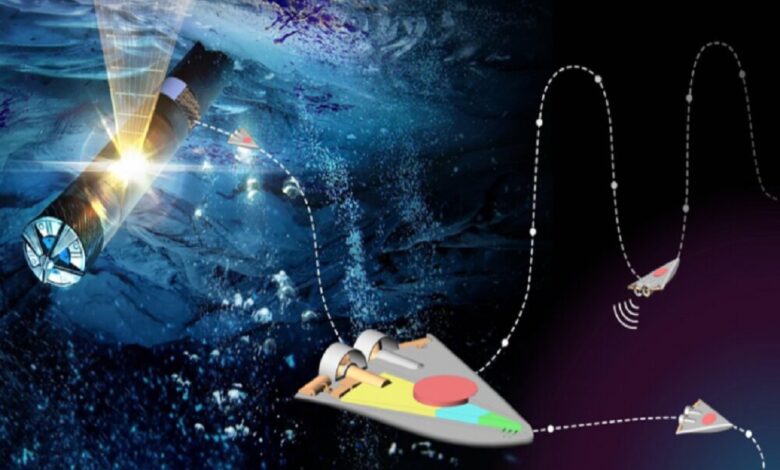
این ماموریت پیشنهادی، یک ماموریت جذاب خواهد بود. بدین ترتیب، ابتدا یک فرودگر روی پوسته یخی یکی از این قمرها فرود میآید و قبل از اینکه کاوشگر خود را به کار بگیرد، از گرمای باتری هستهای خود برای ذوب و ایجاد تونلی از میان یخ به اقیانوس زیرسطحی استفاده میکند. پس از رسیدن به آنجا، کاوشگر حدود 50 ربات شناگر را آزاد میکند تا به طور مستقل یا گروهی شروع به کاوش در آن آبهای سرد کنند.

هر ربات شناگر طولی در حدود 12 سانتیمتر دارد و مجهز به سیستم پیشرانه، رایانه داخلی، ارتباطات فراصوت و مجموعهای از حسگرهای دما، شوری، اسیدیته، فشار و مواد شیمیایی است.
این رباتها میتوانند مانند یک دسته ماهی در آب حرکت کنند و دادههایی را برای جستجوی نشانگرهای زیستی جمعآوری کنند. جالب اینجاست که آنها میتوانند میزان چیزهایی مانند دما یا شوری را در لحظه اندازهگیری کنند.
رباتها قادر هستند تا با فرودگر روی سطح قمر ارتباط برقرار کنند. فرودگر نیز به عنوان یک واسط (رله) کرده، دادهها را از رباتها به زمین منتقل و دستورالعملهای جدید تیم ماموریت را به رباتها ارسال میکند.
رباتهای آبزی دیگری نیز برای کاوش اقیانوسهای فرازمینی پیشنهاد شدهاند. از جمله یک کاوشگر به شکل ماهی مرکب برای کاوش اقیانوس قمر اروپا یا یک زیردریایی برای مطالعه دریاچههای متان مایع واقع در قمر تایتان سیاره زحل، اما پژوهشگران معتقدند که طرح رباتهای شناگر SWIM، وسعتی از اقیانوس را که میتوان کاوش کرد، افزایش میدهد.
با اینکه این ایده جذاب به نظر میرسد، اما در حال حاضر فقط در حد یک طرح مفهومی است و ممکن است هرگز محقق نشود؛ اما اتان شالر، طراح آن که از ناسا 600 هزار دلار برای توسعه فاز دوم این پروژه دریافت کرده است، میگوید این شانس وجود دارد که نمونههای اولیه این رباتهای شناگر طی دو سال آینده ساخته و آزمایش شوند.
انتهای پیام



